近期,机械与汽车工程学院章伟教授指导2021届硕士研究生颜晨航在国际著名期刊《IEEE Transactions on Cybernetics》52卷第9期上,发表题为“Adaptive Bipartite Time-Varying Output Formation Control for Multiagent Systems on Signed Directed Graphs”的最新研究成果。该期刊由美国电气与电子工程师学会(IEEE)主办,系中科院SCI分区工程技术大类和计算机科学大类一区Top期刊,最新的影响因子为19.118。
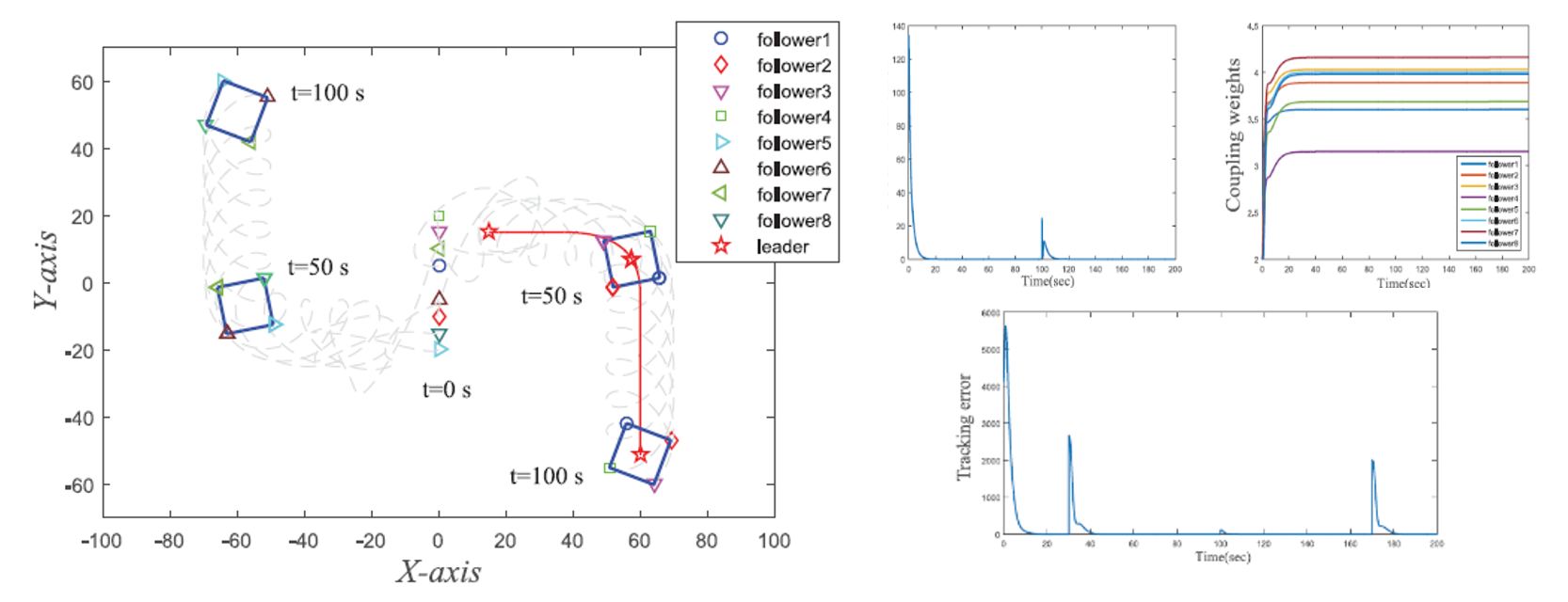
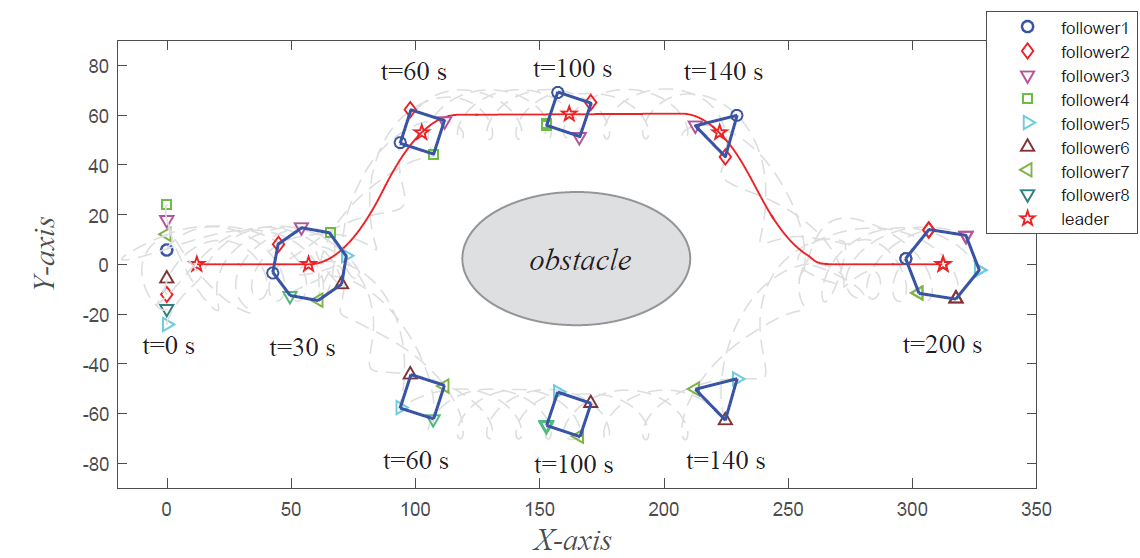
近些年来随着多无人机、多无人车等协同控制技术在军事和民用中发挥着越来越重要的作用,集群智能控制技术得到了飞速的发展,其中分布式多智能体编队控制技术是当前的一个研究热点。该文提出了一种新型的分布式状态观测器设计方案,使得多个智能个体在未知领导者输入的情况下实现一种具有对抗关系的编队队形。这一种编队队形包含两个位置时刻改变的子编队,且它们的编队几何中心具有对称关系。该控制算法仅利用智能体间的输出反馈信息,避免了通信网络图拉普拉斯矩阵的特征值的使用,从而可以实现分布式编队控制。在仿真部分,通过使用多无人车编队的实例展示了该分布式算法的可靠性。该项研究得到国家自然科学基金项目(61991412,61803256,62003207,61873318)的资助,合作者为华中科技大学苏厚胜教授和上海工程技术大学李晓航副教授。
据悉,第一作者颜晨航在硕士期间共发表SCI论文6篇,EI论文2篇,荣获优秀毕业研究生荣誉,现在北京理工大学攻读控制理论与控制工程专业博士学位。近年来,章伟教授科研团队与合作者在多智能体协同控制、编队控制、非线性状态估计等领域取得一些研究进展,已在《IEEE Transactions on Cybernetics》(一区,IF=19.118)《IEEE Transactions on Systems, Man, and Cybernetics: Systems》(一区,IF=11.471)《IEEE Transactions on Circuits and Systems-II: Express Briefs》(二区,IF=3.691)等国际期刊上发表SCI论文60余篇。

